
Moteur pour système spidercam 4 lignes
Lazouzegronenberg
Messages postés
7
Statut
Membre
-
Lazouzegronenberg Messages postés 7 Statut Membre -
Lazouzegronenberg Messages postés 7 Statut Membre -
Bonjour,
Je suis à la recherche d’un (ou plutôt 4) moteur(s) type treuil mais pas aussi puissant / gros et lourd…
Tout ça sera alimenté par batterie.
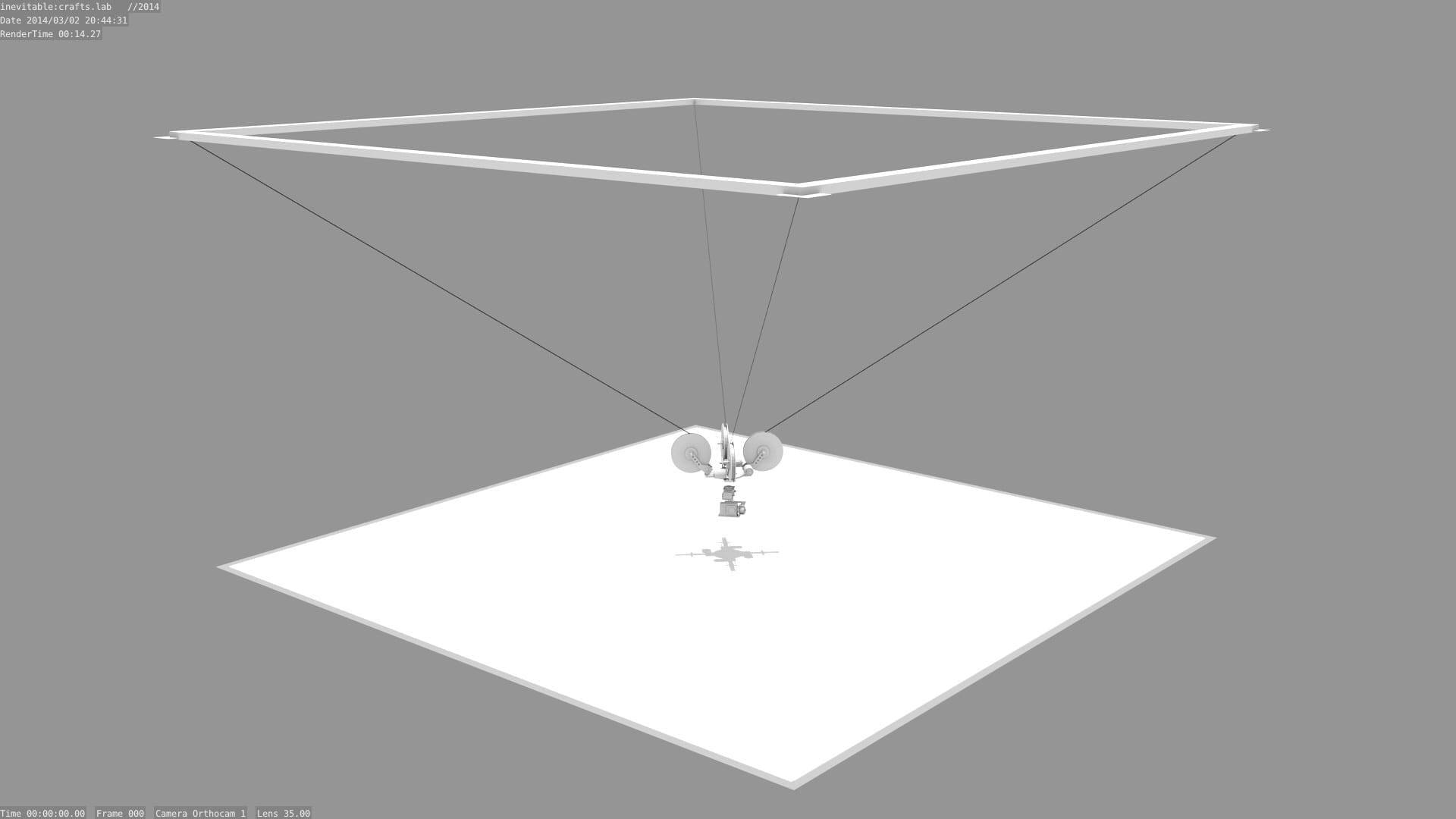
Le but en gros étant de pouvoir déplacer une charge comme sur la photo. Vitesse variable et maintient de la charge en position (du coup des moteurs) lorsque l’on arrête les mouvements (que les cordes en enroulées ne se rejoint déroulent pas toutes seules)
Je reste à vôtre disposition pour plus d’informations et détails. :)
Merci à tous.

Je suis à la recherche d’un (ou plutôt 4) moteur(s) type treuil mais pas aussi puissant / gros et lourd…
Tout ça sera alimenté par batterie.
Le but en gros étant de pouvoir déplacer une charge comme sur la photo. Vitesse variable et maintient de la charge en position (du coup des moteurs) lorsque l’on arrête les mouvements (que les cordes en enroulées ne se rejoint déroulent pas toutes seules)
Je reste à vôtre disposition pour plus d’informations et détails. :)
Merci à tous.

A voir également:
- Spider cam
- Systeme anticalcaire - Guide
- Panne du système de freinage clio 4 - Forum Mécanique, entretien et pannes
- Réglage congélateur 1 à 4 - Guide
- Carte non reconnue clio 4 - Forum Mécanique, entretien et pannes
- Défaut systeme esp/asr faites réparer la voiture - Forum Mécanique, entretien et pannes
5 réponses

Bonsoir,
Apportez des précisons sur votre projet car l'angle de traction sera différent de façon exponentielle avec la hauteur de la charge à soulever (attention danger).
Evitez autant que possible le variateur préférez plutôt la version sécuritaire via la vis sans fin où le moteur n'est plus sollicité lors de son arrêt même si celui-ci ne dispose pas de frein .
Apportez des précisons sur votre projet car l'angle de traction sera différent de façon exponentielle avec la hauteur de la charge à soulever (attention danger).
Evitez autant que possible le variateur préférez plutôt la version sécuritaire via la vis sans fin où le moteur n'est plus sollicité lors de son arrêt même si celui-ci ne dispose pas de frein .

Bonjour,
Juste une petite question : pourquoi 4 moteurs ?
Vous allez avoir des problèmes de synchronisation en temps, en vitesse... et ça vous coûtera 4 fois plus cher.
Et pourquoi des poulies en bas ?
Un seul moteur à enroulement et tirage direct devrait produire le même effet.
Cdt
Juste une petite question : pourquoi 4 moteurs ?
Vous allez avoir des problèmes de synchronisation en temps, en vitesse... et ça vous coûtera 4 fois plus cher.
Et pourquoi des poulies en bas ?
Un seul moteur à enroulement et tirage direct devrait produire le même effet.
Cdt
Vous déplacez le moteur sur le plan X Y, et le moteur s'occupe du Z...
Quelle distance devez-vous parcourir dans chaque plan ?
C'était juste des questions. Si la solution ne vous plaît pas, il n'y a pas de problème.
Après il reste le drone !
C'est entièrement sans fil, ça couvre toutes les directions, il peut rester stationnaire...
tant qu'on ne sait pas précisément ce que vous voulez faire avec, c'est difficile de vous conseiller !
Quelle distance devez-vous parcourir dans chaque plan ?
C'était juste des questions. Si la solution ne vous plaît pas, il n'y a pas de problème.
Après il reste le drone !
C'est entièrement sans fil, ça couvre toutes les directions, il peut rester stationnaire...
tant qu'on ne sait pas précisément ce que vous voulez faire avec, c'est difficile de vous conseiller !
Re,
Ces systèmes utilisent pour la plupart un même "rouleau" embobineur solidaire du même axe .
On ne voit pas deux moteurs différents pour une fermeture de garage .
Votre image montre un système asservi via du numérique (roue codeuse ou autre) .
C'est votre jeu de poulies (ou d'engrenage) qui devront être étudiés .
Cdlt,
Ces systèmes utilisent pour la plupart un même "rouleau" embobineur solidaire du même axe .
On ne voit pas deux moteurs différents pour une fermeture de garage .
Votre image montre un système asservi via du numérique (roue codeuse ou autre) .
C'est votre jeu de poulies (ou d'engrenage) qui devront être étudiés .
Cdlt,
En fait sur le système existant spidercam cam, y’a bien 4 moteurs mais situés au pied de chaque angle de la structure. On a donc un moteur en bas, ça remonte à la verticale, passe par une poulie avant de descendre sur l’ensemble suspendu.
Et ce pour les 4 lignes.
Exemple :
https://www.youtube.com/watch?v=y6C8H-KV49o&feature=youtu.be&ucbcb=1
Et ce pour les 4 lignes.
Exemple :
https://www.youtube.com/watch?v=y6C8H-KV49o&feature=youtu.be&ucbcb=1
S'il se trouve quatre moteurs , ils sont asservi en position comme les servomécanismes .
Pour un projet comme ceci, Arduino avec le protocole devrait convenir
https://www.youtube.com/embed/prun24bIIEA?autoplay=1
Pour un projet comme ceci, Arduino avec le protocole devrait convenir
https://www.youtube.com/embed/prun24bIIEA?autoplay=1
Vous n’avez pas trouvé la réponse que vous recherchez ?
Posez votre question
Bonjour
4 moteurs avec enrouleur et câble + batteries + commande électronique pour gérer une caméra, le tout réuni au centre , vous êtes mal parti .
Regarder ce qui existe . Il n'y a que la caméra au centre le reste et positionné sur les quatre angles . Ensuite il faudra créer la technologie pour gérer le déplacement Pour moi c'est une autre histoire .
Il vaut mieux regarder les matchs à Roland Garros que les caméras :o))
Cordialement.
4 moteurs avec enrouleur et câble + batteries + commande électronique pour gérer une caméra, le tout réuni au centre , vous êtes mal parti .
Regarder ce qui existe . Il n'y a que la caméra au centre le reste et positionné sur les quatre angles . Ensuite il faudra créer la technologie pour gérer le déplacement Pour moi c'est une autre histoire .
Il vaut mieux regarder les matchs à Roland Garros que les caméras :o))
Cordialement.

Sauf que moi je voudrais faire un système où les tout est intégré sur ce qui est suspendu. Une version ultra légère pour petite caméra ????. Tout va dépendre du matériel utilisé pour déterminer le poids total et la puissance et type de moteurs.
Le but étant je le re précise bien, est d’être le plus léger possible. Afin d’avoir du petit câble et donc moins de poids…etc.